Shutong JIN
Hi there! I am a fourth-year PhD student at KTH Royal Institute of Technology, supervised by Prof. Florian Pokorny (main supervisor) and Prof. Erik Elmroth (co-supervisor). Previously, I completed my Master’s degree at Nanyang Technological University and my Bachelor’s degree at Wuhan University. My research is funded by the Wallenberg AI, Autonomous Systems and Software Program (WASP).
I am currently at the UC Berkeley AUTOLAB as a visiting PhD student under the supervision of Prof. Ken Goldberg.
Recent News
- [2026-06] One paper recently accepted for IROS 2026.
- [2026-03] I joined AUTOLab, UC Berkeley.
- [2026-03] One paper recently accepted for IEEE Transactions on Multimedia.
- [2026-01] We are pleased to announce the workshop on Connected Robotic Autonomous System at ICRA 2026. We welcome submissions.
- [2026-01] Keynote talk at the WASP Winter Conference 2026.
- [2026-01] One paper recently accepted for ICRA 2026.
Research
My research spans three threads focused on robotic data curation:
- Understanding how dataset composition and properties influence robot policies performance through real-world case studies at scale.
- Curating additional data to mitigate observed policy performance drops via targeted real-world collection and generative modeling.
- Scaling data curation through parallelization in the cloud.
Research Keywords: Robotic Data Curation, Generative Modeling, Computational Illumination, Cloud Robotics.
Academic Service
- Teaching: DD2424 Deep Learning in Data Science, DD1420 Foundations of Machine Learning.
- Workshop Organization: RoDGE, IROS 2025 Workshop; CloudGripper, CoRL 2026 Demo; Connected-Robots, ICRA 2026 Workshop.
- Reviewing Activities: RSS, CoRL, ICRA, IROS, CASE, RA-L, CVPR, ICCV ECCV, WACV.
- Supervised Master's Students: Axel Kaliff, Ben Temming, Jin Yang.
Publications
|
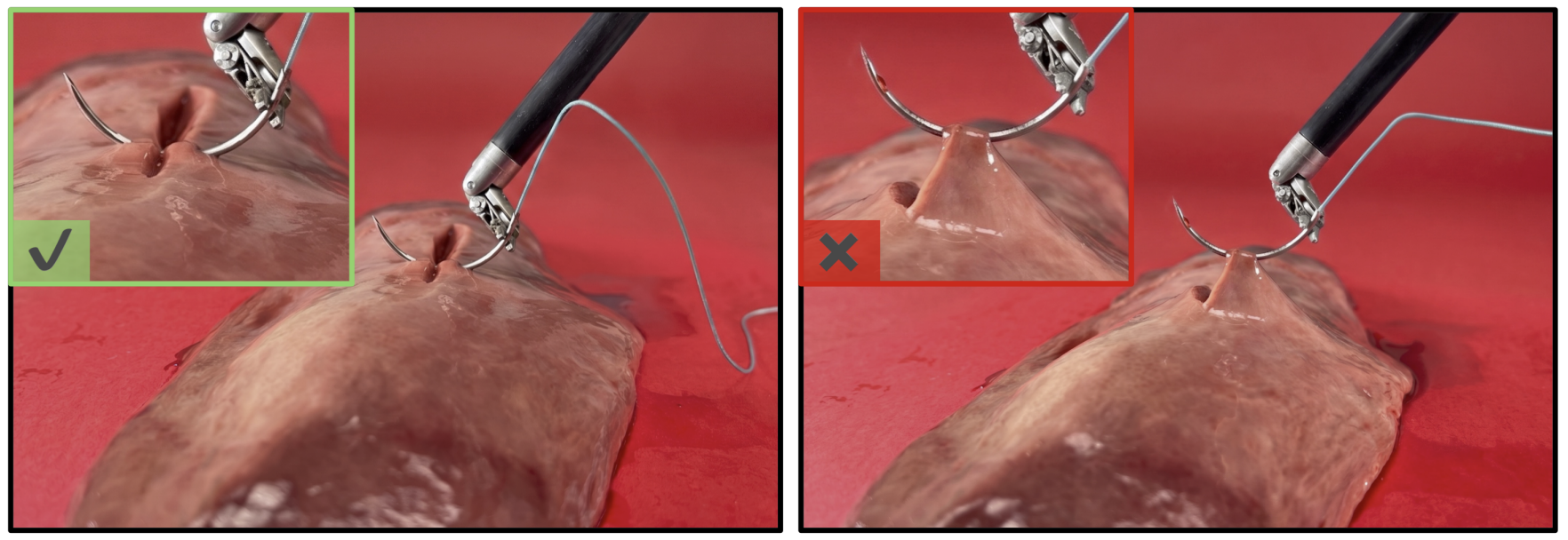
Adversarial Attacks on Learned Policies for Surgical Robotic Tasks [Link] Shutong Jin*, Ziyang Chen*, Preethi Satish, Paavan Gupta, Florian T. Pokorny and Ken Goldberg Under Review
|

|
R900: An Analysis of the Cost-Effectiveness of Random Exploration based on 900 Hours of Robotic Stacking [Link] Shutong Jin*, Axel Kaliff*, Ruiyu Wang, Zahid Muhammad and Florian T. Pokorny Under Review
|
|
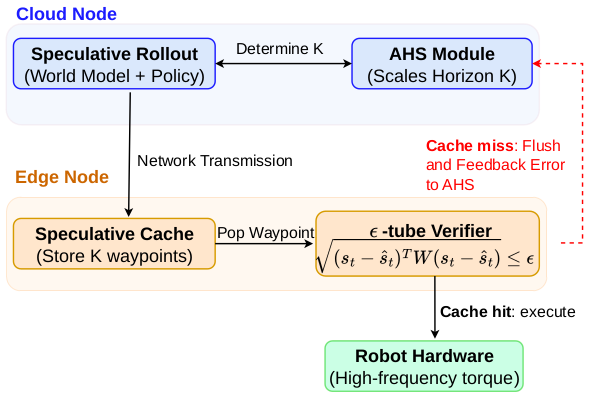
Speculative Policy Orchestration: A Latency-Resilient Framework for Cloud-Robotic Manipulation Chanh Nguyen*, Shutong Jin*, Florian T. Pokorny and Erik Elmroth Under Review
|
|
ReLumix: Extending Image Relighting to Video via Video Diffusion Models [Link] Lezhong Wang, Shutong Jin, Ruiqi Cui, Anders Bjorholm Dahl, Jeppe Revall Frisvad and Siavash Bigdeli Under Review
|
|
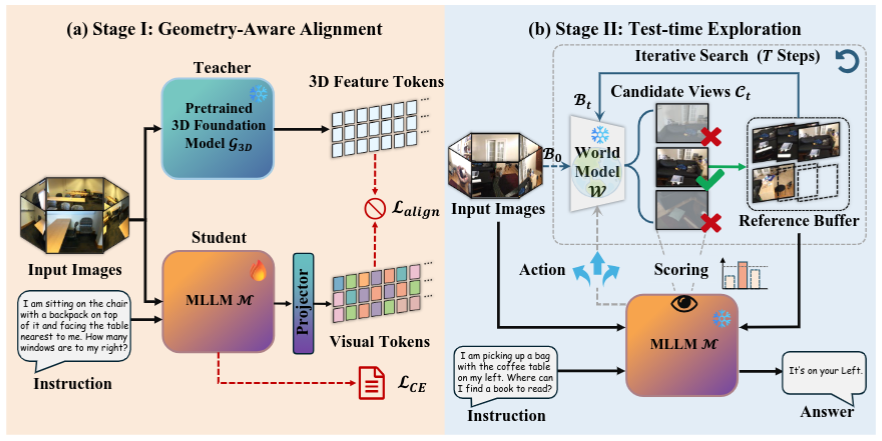
Look Before You Answer: Enhancing 3D Reasoning Abilities via Geometric Awareness and Test-Time Exploration Chenhao Zhang, Yingbo Tang, Shutong Jin, Lingfeng Zhang, Yu Liu, Xiu-Shen Wei, Pan Li, Hangjun Ye, Xiao-Ping Zhang, Long Chen and Xiaoshuai Hao Under Review
|
|
RoboLight: A Dataset with Linearly Composable Illumination for Robotic Manipulation [Link] Shutong Jin*, Jin Yang*, Zahid Muhammad and Florian T. Pokorny 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
|
|
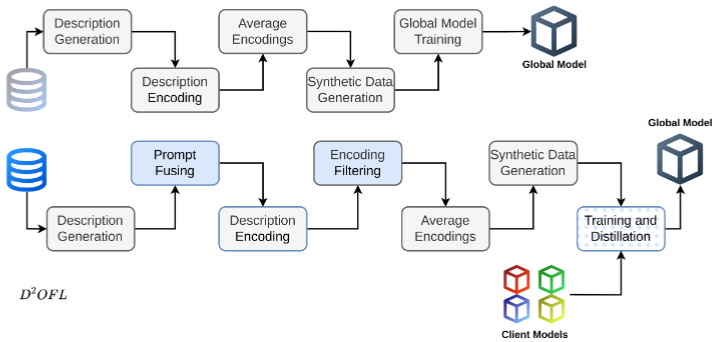
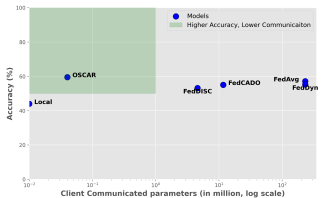
D2OFL: Distillation-Enhanced Diffusion Model Assisted One-Shot Federated Learning Obaidullah Zaland, Shutong Jin, Florian T. Pokorny and Monowar Bhuyan IEEE Transactions on Multimedia 2026.
|
|
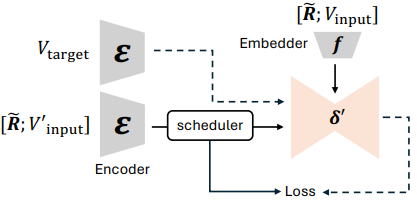
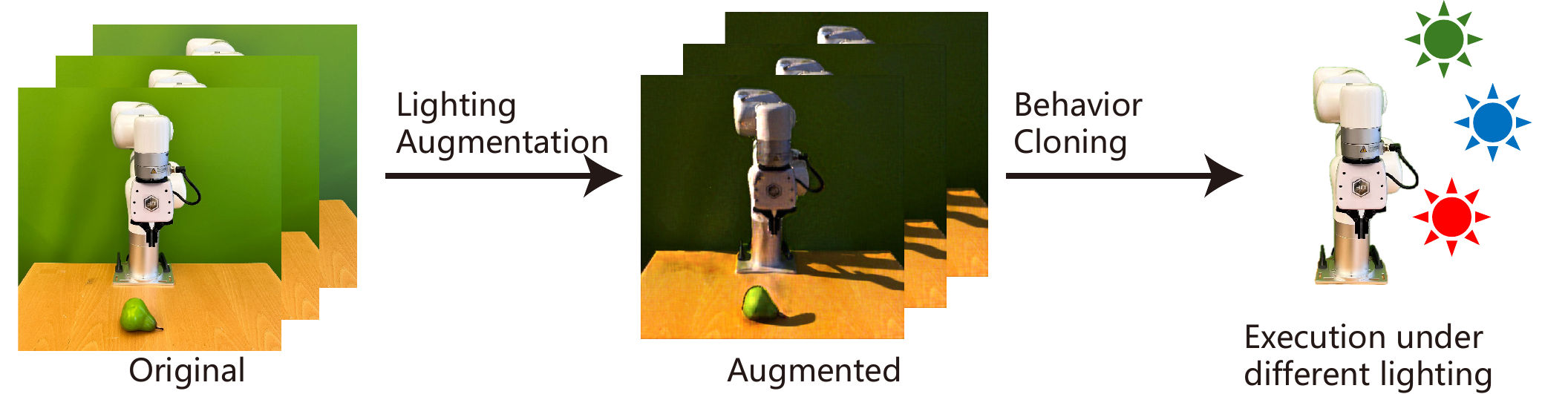
Physically-based Lighting Generation for Robotic Manipulation [Link] Shutong Jin*, Lezhong Wang*, Ben Temming and Florian T. Pokorny 2026 IEEE International Conference on Robotics & Automation (ICRA)
|
|
One-Shot Federated Learning with Classifier-Free Diffusion Models [Link] Obaidullah Zaland*, Shutong Jin*, Florian T. Pokorny and Monowar Bhuyan IEEE International Conference on Multimedia & Expo (ICME) 2025
|
|
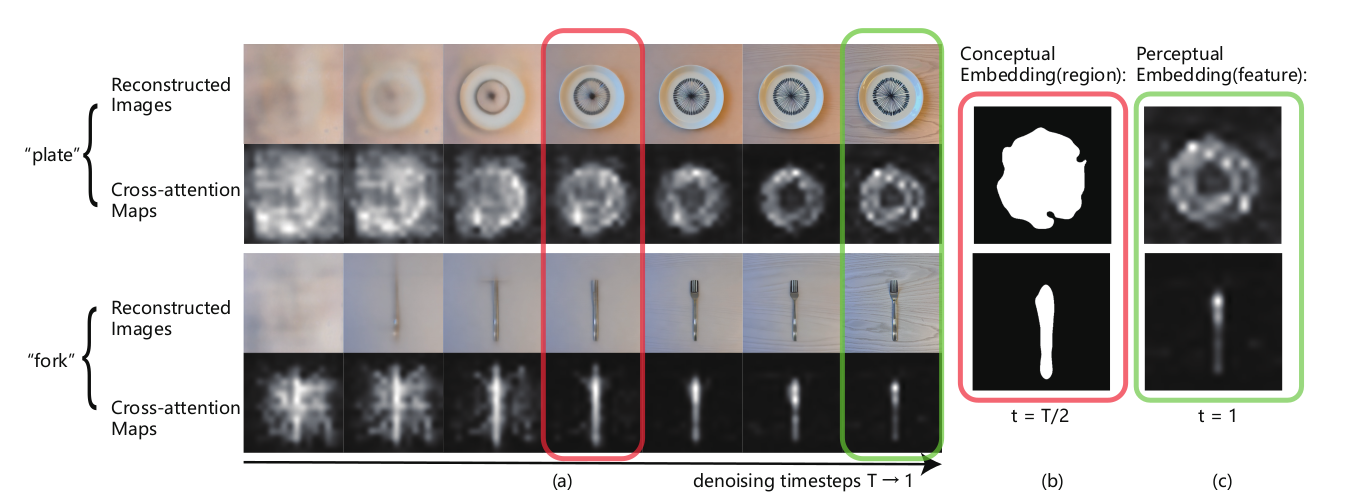
PACA: Perspective-Aware Cross-Attention Representation for Zero-Shot Scene Rearrangement [Link] Shutong Jin*, Ruiyu Wang*, Kuangyi Chen and Florian T. Pokorny Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2025
|
|
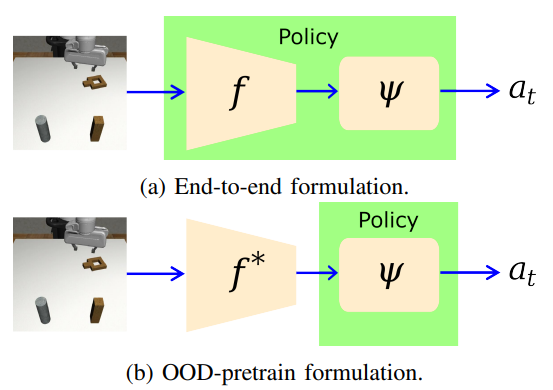
Feature Extractor or Decision Maker: Rethinking the Role of Visual Encoders in Visuomotor Policies [Link] Ruiyu Wang, Zheyu Zhuang, Shutong Jin, Nils Ingelhag, Danica Kragic and Florian T. Pokorny 2025 IEEE International Conference on Robotics & Automation (ICRA).
|

|
CloudGripper-Push-1K: Understanding the Generalization Gap of Physics and Background Attributes for Robotic Manipulation Shutong Jin, Ruiyu Wang, Zahid Muhammad and Florian T. Pokorny IEEE/RSJ IROS 2024 Workshop on Collecting, Managing, and Utilizing Data through Embodied Robots.
Best Poster Award |
|
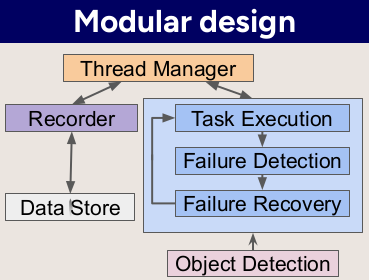
CloudGripper-AutoGrasper: A Cloud Robotics Toolkit for Automatic Data Collection Axel Kaliff, Shutong Jin, Zahid Muhammad and Florian T. Pokorny IEEE/RSJ IROS 2024 Workshop on Collecting, Managing, and Utilizing Data through Embodied Robots.
|
|
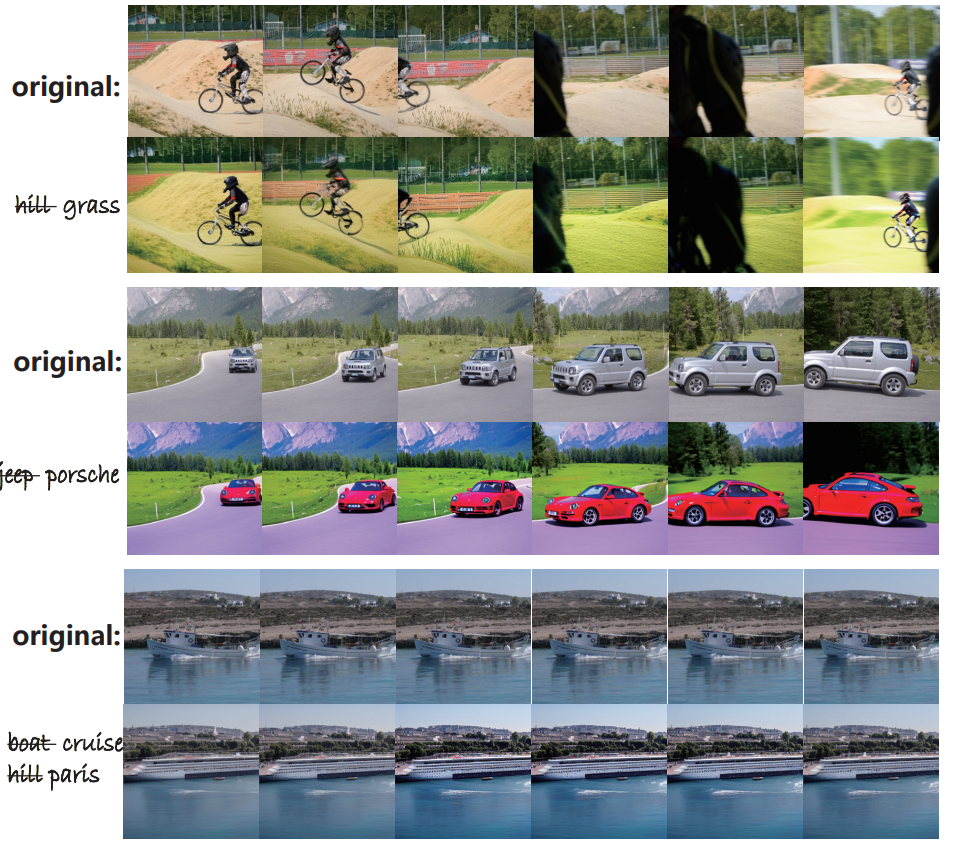
RealCraft: Attention Control as A Tool for Zero-shot Consistent Video Editing [Link] Shutong Jin, Ruiyu Wang and Florian T. Pokorny 32nd International Conference on Neural Information Processing.
|
|
How Physics and Background Attributes Impact Video Transformers in Robotic Manipulation: A Case Study on Planar Pushing [Link] Shutong Jin, Ruiyu Wang, Muhammad Zahid and Florian T. Pokorny 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
|
|
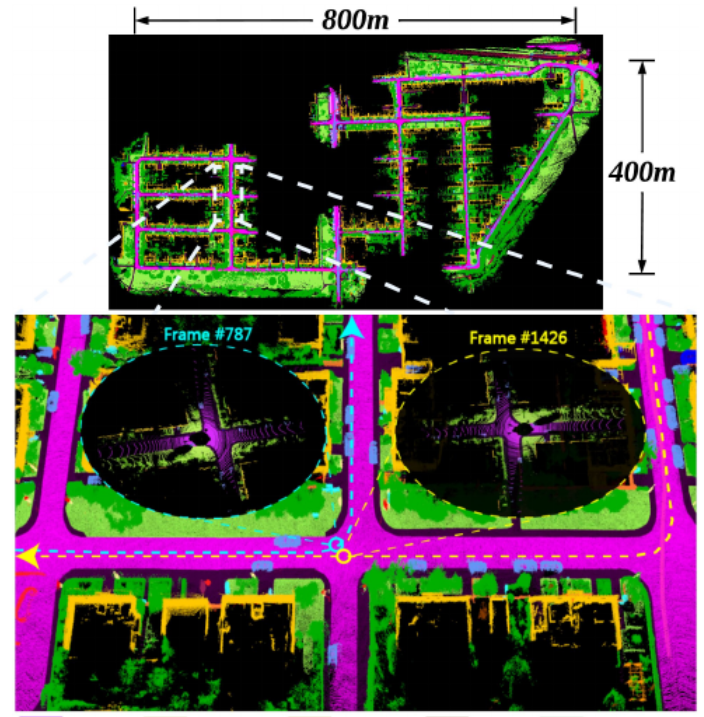
SectionKey: 3-D Semantic Point Cloud Descriptor for Place Recognition [Link] Shutong Jin*, Zhenyu Wu*, Chunyang Zhao, Jun Zhang, Guohao Peng and Danwei Wang 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
|
Education
|
|
PhD Candidate: KTH Royal Institute of Technology (Sweden)
|
|
|
Visiting PhD Student: University of California, Berkeley (USA)
|
|
|
Master: Nanyang Technological University (Singapore)
|
|
|
Foundation Master: Ecole Centrale de Nantes (France)
|
 |
Bachelor: Wuhan University (China)
|